Quadrokopter im Eigenbau !


Vor einigen Jahren habe ich mir das original Silverlit X-Ufo zugelegt und damit meine ersten Erfahrungen mit diesen Fluggeräten gesammelt.
Die ersten Flugversuche waren sehr ernüchternd im Bezug auf Flugtauglichkeit und Zuverlässigkeit ... Kurvenflug bzw. Neigung mit mehr
als 30Grad Schräglage wurden durch sofortigen Überschlag bestraft ... Ursache war hierfür die mech. Begrenzung des Kreisel... und der Spass dauerte auch
immer nur wenige Minuten ... kostete 50€ ... der Schaden hielt sich also in Grenzen !
Nachdem das 'Spielzeug' dann mehrere Monate auf dem Regal verstaubte, stieß ich zufällig im I-Net auf ein Video eines getunten X-Ufo's ... extrem wendig ...
Looping ... Rollen ... sensationell ... muß ich haben !!
Das Geheimniss lag in einem elektronischen Kreisel (X3D - 190€) , durch welchen der originale-mechanische 'Schrott' ersetzt wurde ... bestellt ... eingebaut ... programmiert ... flog
dann im Vergleich zum Silverlit-Original genial ... aber immer noch mit den originalen Bürstenmotoren !!
Dann gings weiter ... ich wollte mehr .... es gab mehr ... neue Hauptplatine ... Brushlessmotoren .... Brushlessregler ... 35Mhz-Empfänger und zu guter letzt CFK-Rahmen ...
vom originalen X-Ufo blieben lediglich die Propeller in Verwendung !
Die Kosten beliefen sich mittlerweile auf happige ca. 800€ ... aber zu damaligen Zeit jeden Cent Wert --> GPS und Beschleunigungssensor habe ich mir gespart ... fliegen konnte ich ja schon !
.... dieses Jahr stand dann mein Vereinskollege mit einem Eigenbau-Quadrocopter am Platz ... Uiiiiieee ... schaut Euch mal die Videos von Warthox an ... genial !!
Als erstes wurde im Markus sein Eigenbau ausspioniert und im Netz nach Unterlagen/Anleitungen/Infos hierzu gesucht ... alles benötigte findet man auf der KK-Multicopter-Seite www.kkmulticopter.com !
Als zweites habe ich mein X3D-Ufo auf Ebay vertickt ... wer weis wie lange man dafür noch einen anständigen Preis bekommen kann !
Mittlerweile gibt es jede Menge Eigenbaukonstruktionen mit preiswerten Alternativen (Motoren/Regler/Kreisel), welche im Flugverhalten meinem 'gepimpten' X-Ufo
in nichts nachstehen ... Komplettkosten ca. 120 bis 150€ ... !!
Vorteile KK-Multicopter: billigste China-Motoren, - Regler und Kreisel funktionieren perfekt ... einfache und leicht selbst herstellbare Mischerplatine ... jede 4-Kanal Fernsteueranlage
verwendbar !!
... dann mal los:
Rahmen:
Da ich mir schon einmal Ersatzausleger für's X3D-Ufo gezeichnet und gefräßt habe wurden diese Konstruktion noch etwas angepasst und verwendet ...
fix gefräßt und probeweise zusammengeschraubt ....


 ... sieht doch schon gut aus !
... mittlerweile sind die Motoren und die Regler eingetroffen ...
... sieht doch schon gut aus !
... mittlerweile sind die Motoren und die Regler eingetroffen ...

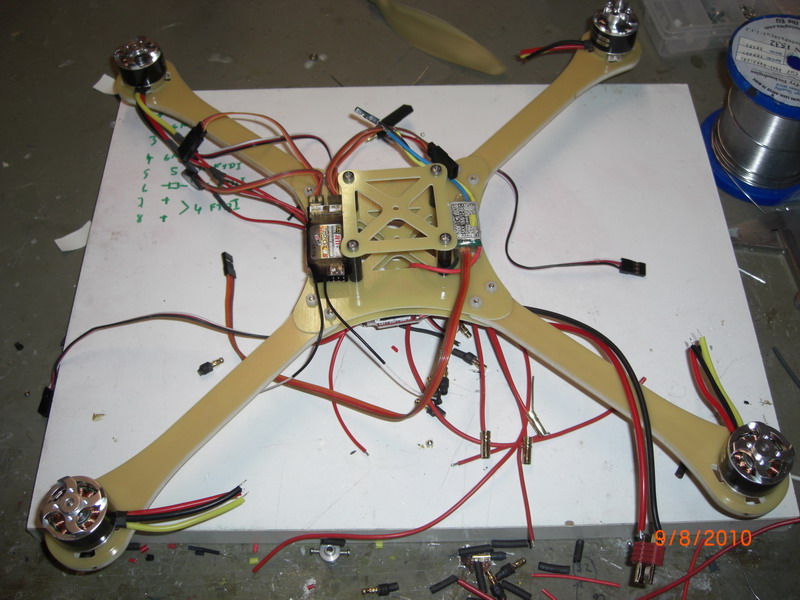 ... Kabelsalat ...aber das wird noch !!
... komplett fertig ... mit Landekufen vom 450'er Heli !
... Kabelsalat ...aber das wird noch !!
... komplett fertig ... mit Landekufen vom 450'er Heli !

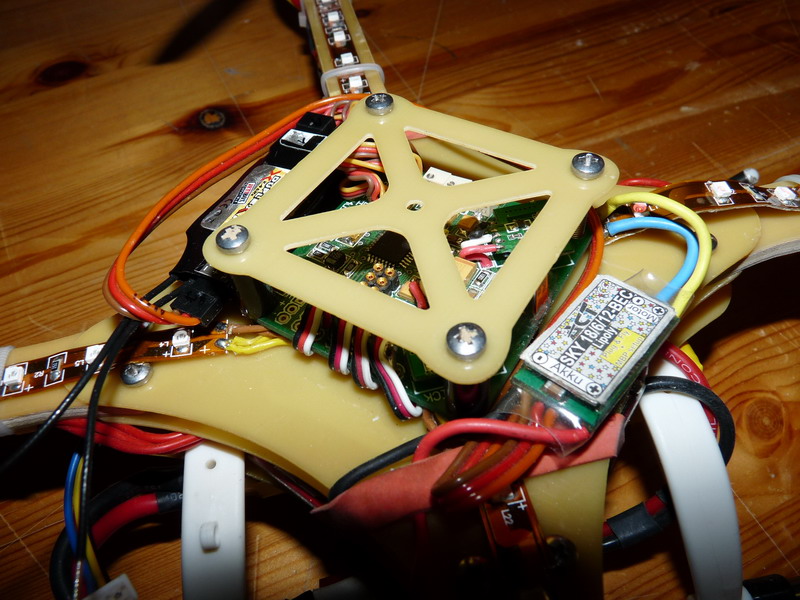 ... von oben ... der ACT-Regler dient zur dimmbaren Versorgung' der Beleuchtung !
... von oben ... der ACT-Regler dient zur dimmbaren Versorgung' der Beleuchtung !

 ... von unten !
... von unten !
 ... natürlich mit Licht ... über 'brushed'-Regler dimmbar !
... natürlich mit Licht ... über 'brushed'-Regler dimmbar !

 ... meine Wahl ... SK2822-1200 + Prop EPP 8x4,5
Bilder vom 'Feldversuch' werden noch folgen !
... meine Wahl ... SK2822-1200 + Prop EPP 8x4,5
Bilder vom 'Feldversuch' werden noch folgen !
Platine:
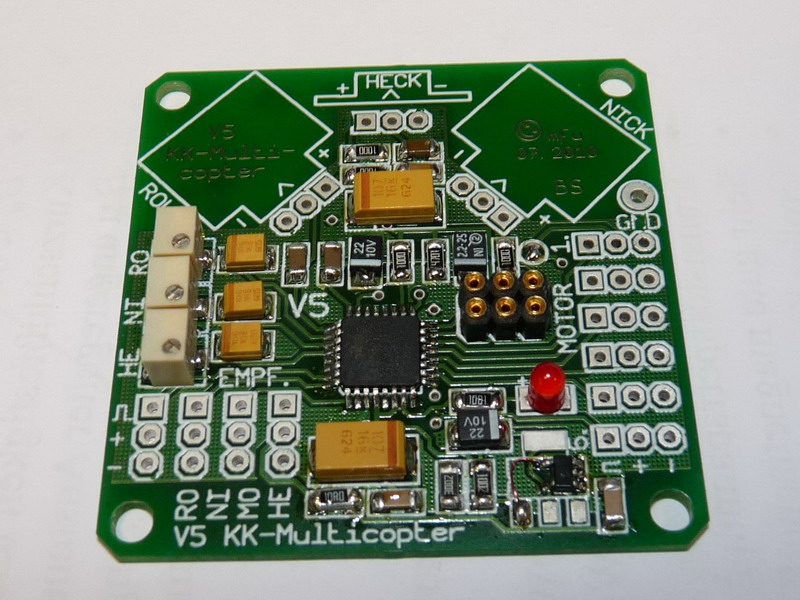
 Originalschaltung bzw- Originalboard (V5/SMD)
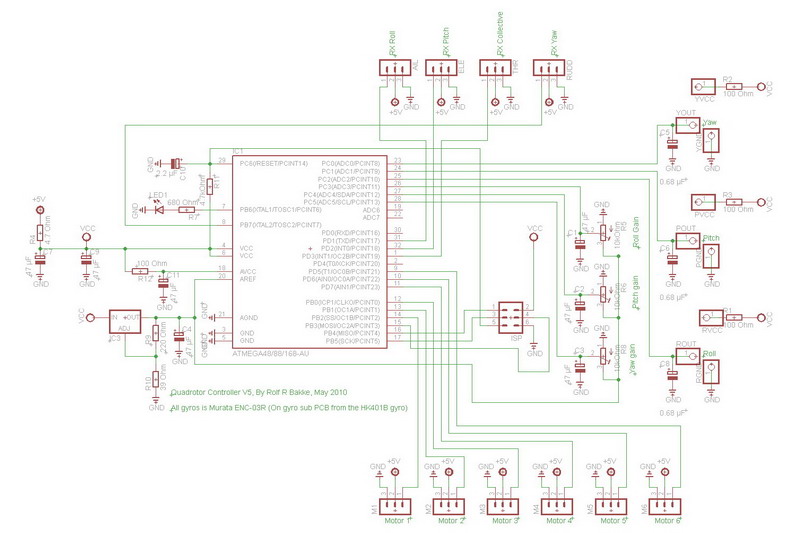
Da ich beruflich in dieser Sparte (Elektronik-Entwicklung) arbeite, habe ich mir fix eine passende Platine entworfen und geroutet ... die prinzipielle
Schaltung wurde vom KK-Multicopterboard übernommen, es wurden lediglich ein paar 'Optimierungen' im Bezug
auf Störfestigkeit und Genauigkeit vorgenommen ... Befestigungsmaße habe ich auch übernommen, um 'kompatible' zu bleiben !
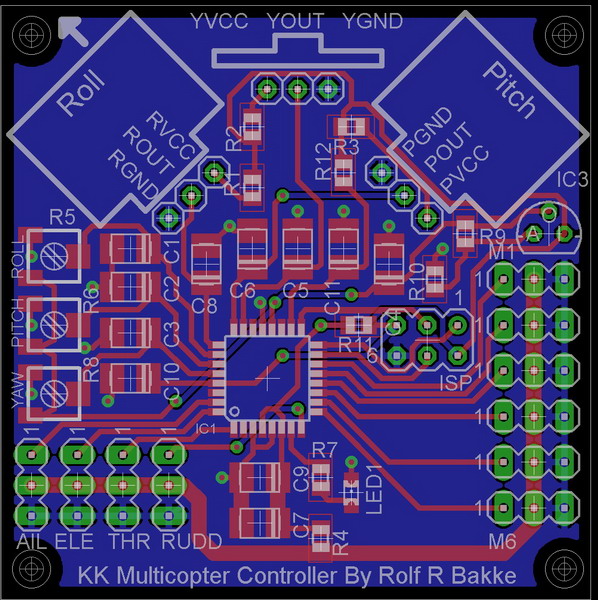
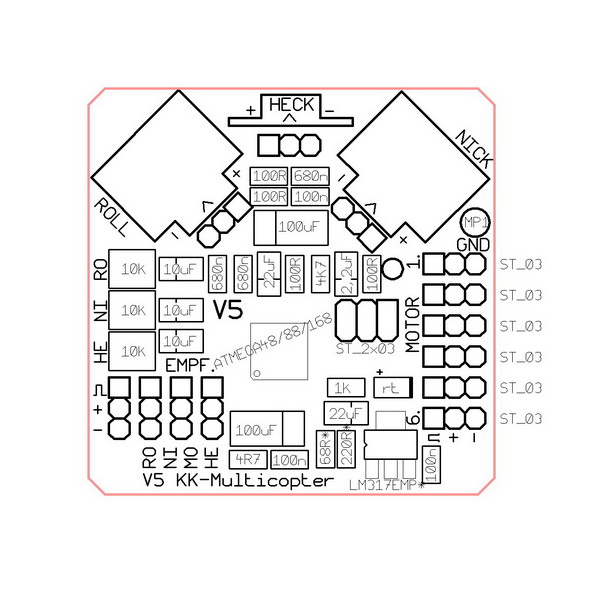
mein Schaltplan + Bestückungsplan
Originalschaltung bzw- Originalboard (V5/SMD)
Da ich beruflich in dieser Sparte (Elektronik-Entwicklung) arbeite, habe ich mir fix eine passende Platine entworfen und geroutet ... die prinzipielle
Schaltung wurde vom KK-Multicopterboard übernommen, es wurden lediglich ein paar 'Optimierungen' im Bezug
auf Störfestigkeit und Genauigkeit vorgenommen ... Befestigungsmaße habe ich auch übernommen, um 'kompatible' zu bleiben !
mein Schaltplan + Bestückungsplan
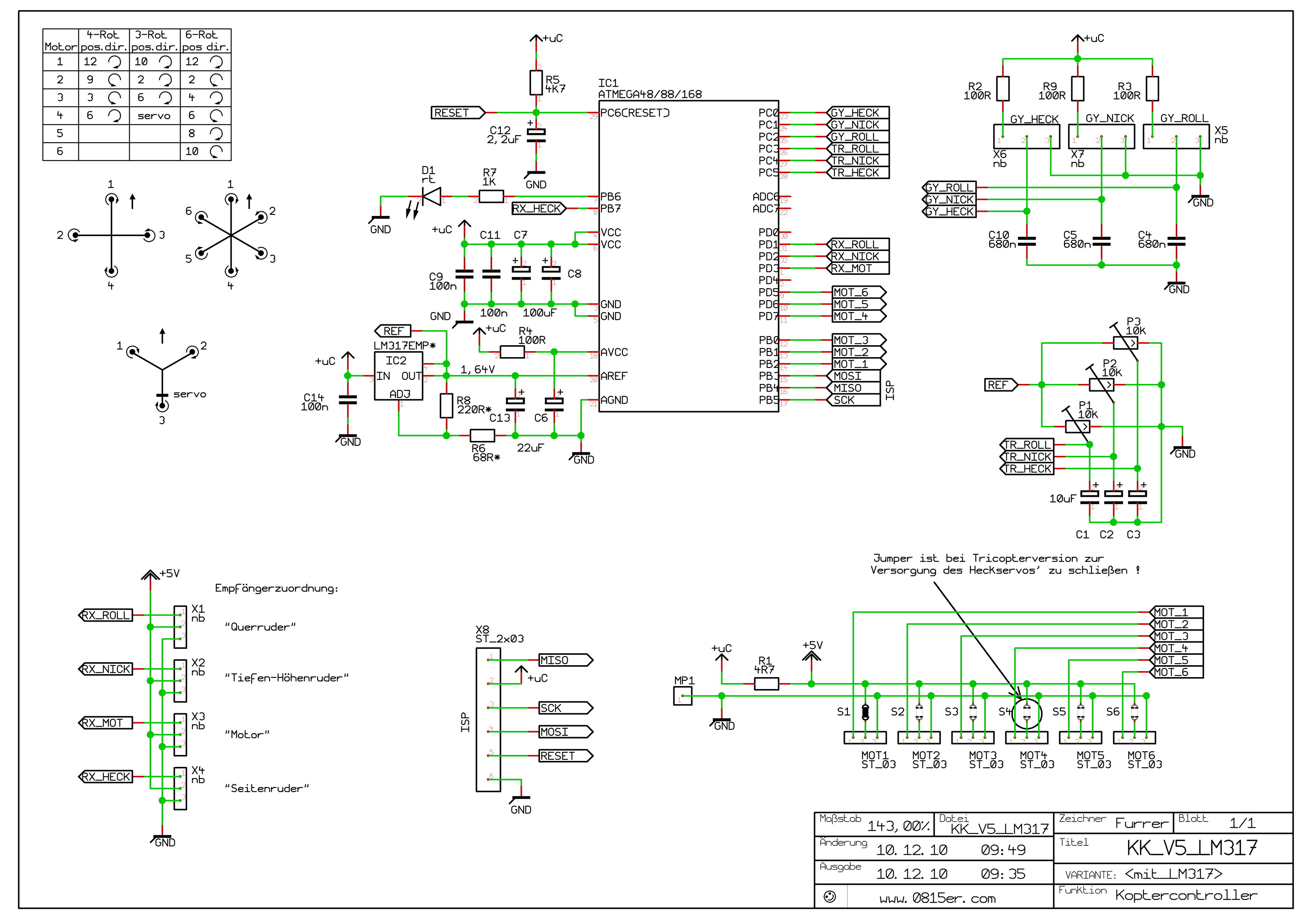
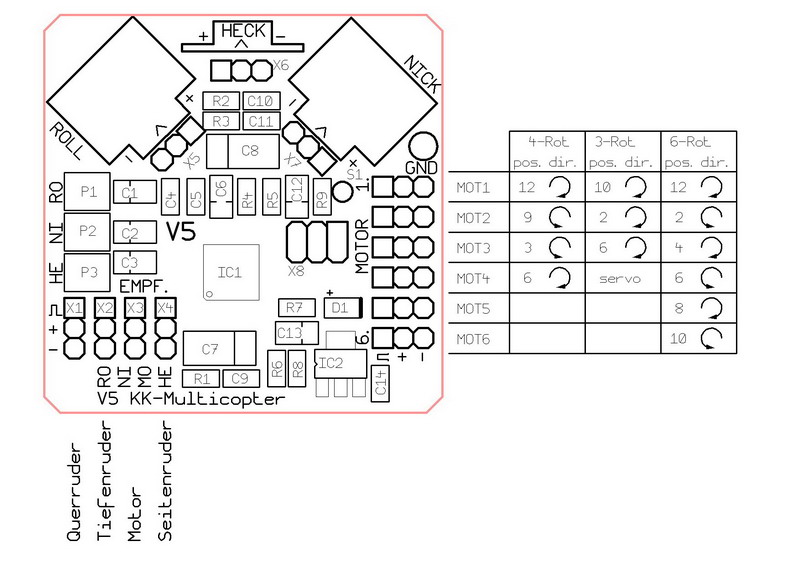
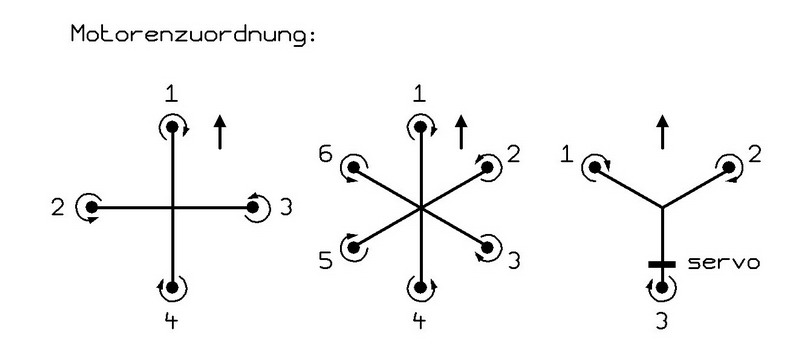
 Belegung & Drehrichtung der Motoren ... für Quad- Tri- oder Hexcopter !
Belegung & Drehrichtung der Motoren ... für Quad- Tri- oder Hexcopter !
 ... und so sieht's sie bestückt aus ... hier mit 'spezial-Referenz LP2980-ADJ* !
... und so sieht's sie bestückt aus ... hier mit 'spezial-Referenz LP2980-ADJ* !
 ... fehlen nur noch die Kreisel !
... fehlen nur noch die Kreisel !
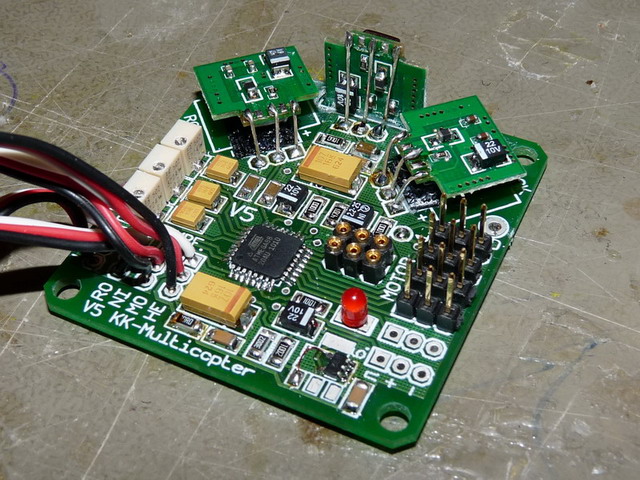
 ... mit Kreisel und Empfängeranschlüssen !
... mit Kreisel und Empfängeranschlüssen !

 ... da kommt Software drauf und erste Test's !
... da kommt Software drauf und erste Test's !
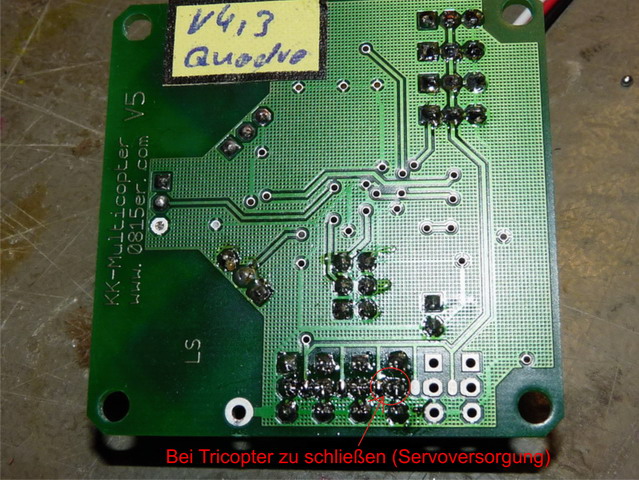 ... bei Tricopterversion ist die markierte Lötbrücke zu schließen --> +5V-Heckservoversorgung !
... bei Tricopterversion ist die markierte Lötbrücke zu schließen --> +5V-Heckservoversorgung !
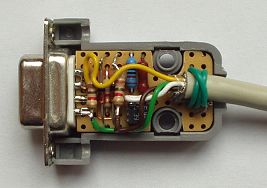
... hier bastele ich mir einen einfachen Programieradapter ... !
--> Infos findet man hier: AVR-Programmierung
Seriell:
 oder Parallel:
oder Parallel:

 Mit einer dieser beiden oberen Schaltungen kann man in Verbindung mit der Programmiersoftware PonyProg über den 6-poligen Stecker
den uC-PIC seine 'Betriebssoftware einflashen' ... ISP-programmieren (ISP: Incircuit-Seriell-Programming) ...
d.h der Prozessor kann eingelötet in der Platine programiert werden ... ich verwende erfolgreich die serielle Version !
Beim Programmieren ist die richtige Einstellung der Konfigurationbit's des Prozessors zu beachten !!
Mit einer dieser beiden oberen Schaltungen kann man in Verbindung mit der Programmiersoftware PonyProg über den 6-poligen Stecker
den uC-PIC seine 'Betriebssoftware einflashen' ... ISP-programmieren (ISP: Incircuit-Seriell-Programming) ...
d.h der Prozessor kann eingelötet in der Platine programiert werden ... ich verwende erfolgreich die serielle Version !
Beim Programmieren ist die richtige Einstellung der Konfigurationbit's des Prozessors zu beachten !!
 Hilfe bei der Fehlersuche: www.kkmulticopter.com
Hilfe bei der Fehlersuche: www.kkmulticopter.com
Technische Daten :
Motorabstand: 40cm
Gewicht ohne Akku: xxx gr
Stromaufnahme 'schweben' : x,x A
Stromaufnahme 'vollgas' : x,x A
maximale Zugkraft: xxx gr
Motorisierung: 4x Brushlessmotor Größe ca. 2822 / 1200-1400U/V z.B SK 2822 (13$) , FC2822 / (5,95$) , TY 2822CQ (8,99$) , TY 2822 (12,35$) , TY SK2822 (13,00$)
Propeller: 2x2 EPP 8x4,5 od. GWS_HD8040 + GWS_HD8040-CR
Akku: Lipo 3S1P 1500mAh bis 3300mAh
Regler: 4x Turnigy Plush 12Amp od. Turnigy Plush 10Amp od. Turnigy_20A od. TURNIGY_Plush_18A
Kreisel: 3x HK401B
Beleuchtung: selbsklebende LED-Bänder / 12V
einfache Programmierung des Atmega-uC: s-huehn.de/elektronik/avr-prog/avr-prog-alt.htm
andere KK-Projekte :
Downloads zum KK-Multicopter:
Videos: